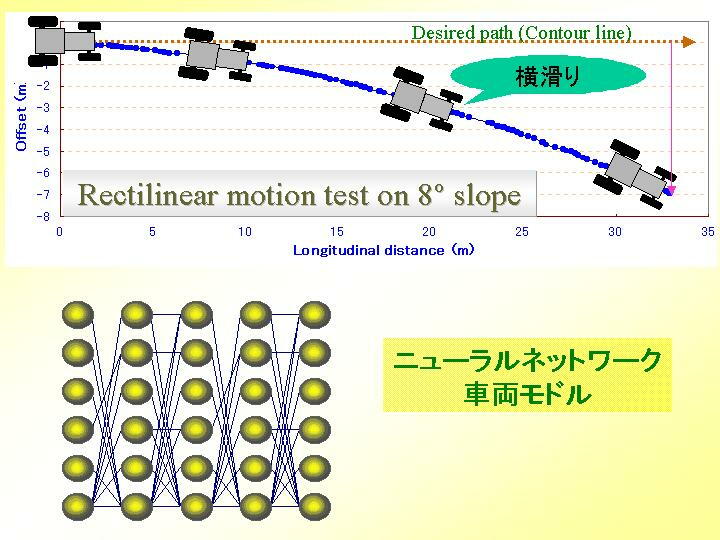
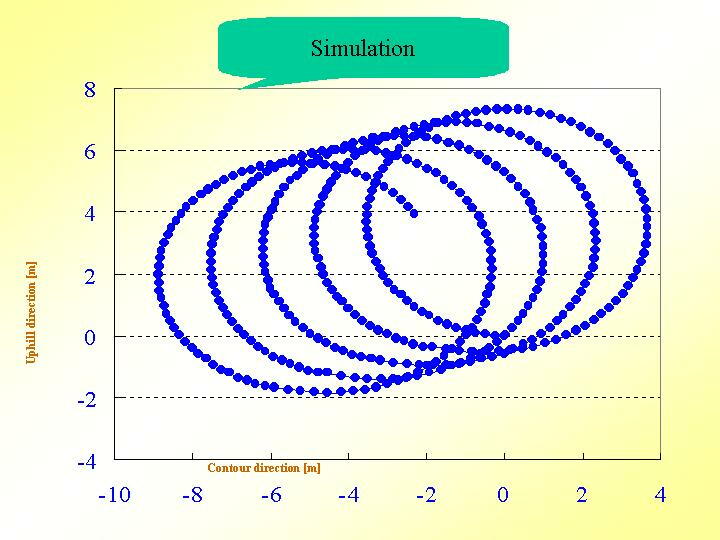
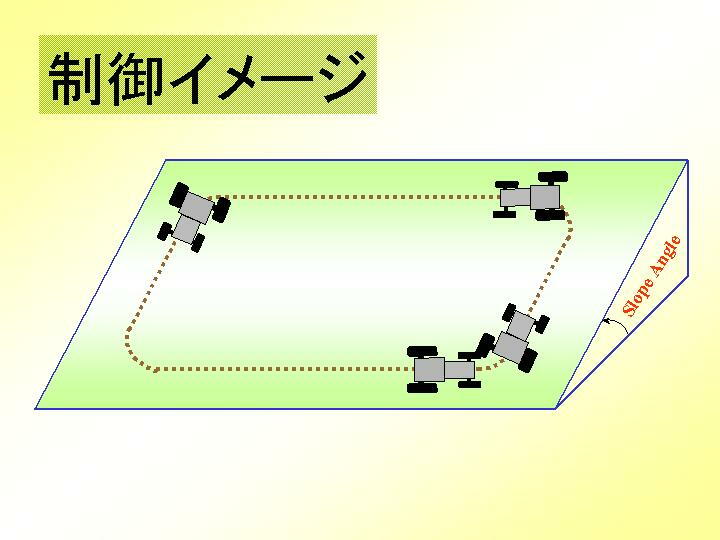
農業就業人口の高齢化・減少に伴って、農作業の自動化・無人化が重要になって きています。本研究は農用トラクタを用いて、傾斜地を自由に移動できる車両型移動ロボットを実現する ことです。現在は、コンピュータとGPSなどを利用し、無人走行をある程度できるようになっています。 また、この研究は主に農場の傾斜地を利用して行っています。