
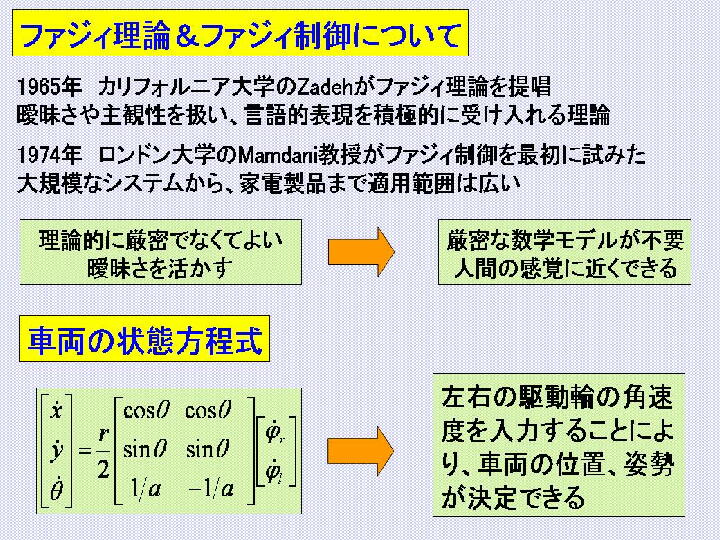
農用トラクタ、コンバイン、運搬車両などに用いられているクローラ型車両 を人間が制御する時の曖昧さを取り入れることが可能なファジイ理論を用いて コントロールしようと試みています。最終的には、完全な自律走行を目的とし ています。
研究の背景と目的| 近年、農業従事者の高齢化、減少に
より労働力の不足が問題となっています。これらの問題を解決するために
機械化、自動化が挙げられます。そして省力化、生産性の向上を目指して
います。 現状ではクローラ型車両は旋回性、安定性に優れており、運搬・管理・防除 ・軟弱地や傾斜地などに用いられています。 クローラ型車両の実現の手順は、ファジイコントローラの設計⇒シミュレー ションプログラムの開発⇒基礎特性の把握⇒自律走行の実現という流れに なっています。 |
| ・実車実験を行いシミュレーションの結果を確認する。 ・ファジイ制御のメンバーシップ関数の特定に、ニューラルネットワークと遺伝的アルゴリズムを利用する。 という2点が挙げられます。 |

