
農業用ロボットカメラの目に相当する技術を開発する ために、ビデオカメラの画像から農用車両の画像処理による農用車両の走行 経路の創出や障害物の認識に関する研究を行っています。
研究の目的と背景| 果樹栽培では高齢化に伴い
その作業が大きな負担となっています。そのため労働負担軽減の要望と作業
時間短縮の要望があります。 よって、これらの問題を解消するために、自律走行台車の開発を行って います。自律走行台車を実現させるためには、樹木列の認識をし、 その上で台車の走行経路の推定を行うことが必要となってきます。 |
画像処理の方法は以下の図に示すような流れとなります。
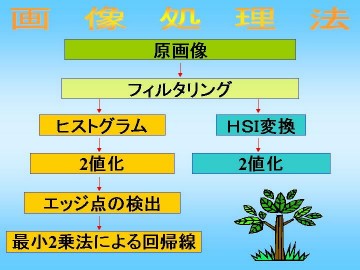


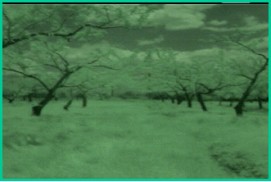

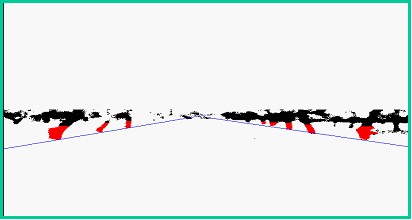
| 春の桃の樹木列を撮影した
画像は、ヒストグラムを用いて適宜、閾値を設定することにより、
比較的良好な2値画像が取得でき、回帰線を引くことができる。 研究課題は ①各種自然条件下での確実な樹木列の検出方法の検討 ②何らかの理由によりカメラの向きがずれた場合、そのずれを修正するための認識法の検討がある。 |